







PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD


 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


As RF engineers, everyone must have conducted microwave testing. Although most RF and microwave testing systems only measure a few broad categories including amplifiers, transmitters, receivers, etc., each individual system will face different environmental conditions, requirements, and challenges. Although each situation may be different, there are three common factors that affect each other when defining any RF and microwave testing system: performance, speed, and stability. The trade-off between these three factors will determine whether the measurement results can meet the required level of integrity, as each system developer faces different situations. On the path between DUT and the measuring instrument (Figure 1), there are many points where these factors can be considered when making trade-offs. This article suggests an architecture that takes into account these trade-offs and provides six tips on how to overcome common problems encountered on the RF signal path.
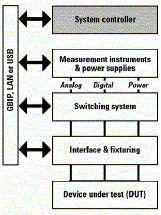
Figure 1: In all testing system architectures, there are many opportunities to strike a balance between performance, speed, and stability to control the accuracy of measurements.
Tip 1: Prioritize efficiency, speed, and stability
In order to provide a basis for discussing all six secrets, it is necessary to first clarify our definitions of efficiency, speed, and stability. In most cases, only one or two factors will be the primary consideration, dominating your testing needs and equipment selection. Regardless, carefully examining the interrelationships and trade-offs between efficiency, speed, and stability (as summarized in Tables 1 to 3) will assist you in managing your unique demand situation.
Basic Definition
In RF and microwave testing equipment, Agilent Technologies' definition of "efficiency" mainly refers to the accuracy, measurement range, and bandwidth of the instrument. The accuracy of the instrument includes the specified measurement accuracy of amplitude and frequency; The measurement range refers to the dynamic range, distortion, noise level, and phase noise, which can affect the degree of signal level measurement; And bandwidth refers to the frequency width or data rate that can be processed and analyzed. The speed or throughput of a speed testing system will depend on the hardware, input/output (I/O) interface, and software used. Our focus will be on hardware and four factors that affect speed: measurement setup time, measurement execution time, data processing time, and data transmission time. A crucial step in setting time for RF and microwave frequencies is the settling time required for the DUT or test system after each change, such as switching on or off or changing power levels. Stable consistency is crucial for any testing system, as it ensures consistent results from every test and every day. However, good stability does not necessarily mean high accuracy, as accuracy depends on the performance of individual instruments. Stability refers to the consistency of the measured results regardless of the specified accuracy. For each instrument, stability may vary due to certain measurements or modes, so it is important to check the product specifications or inquire with the manufacturer. To some extent, by averaging more times or modifying the algorithm to accurately approximate the results obtained by standard measurement methods, stability can be improved. Reducing the number of changes in measurement settings (such as center frequency, frequency spacing, and attenuation level) to a minimum can achieve stable consistency.
Overview of the Relationship among the Three
Testing requirements and commercial considerations can assist you in evaluating the relative importance between performance, speed, and stability. Once you establish the primary consideration criteria and the level of their requirements, it is easier to understand their relationship and impact on the system. Tables 1, 2, and 3 respectively summarize the interrelationships between two situations: whether the primary consideration condition is high or low.
Table 1: When efficiency is the primary consideration, the important mutual influencing factors are efficiency and speed.

Table 2: When speed is the primary consideration, the important relationship lies in speed and stability.

Table 3: When stability consistency is the primary consideration, important relationships are also stability consistency and speed.

Stability and Efficiency
In Tables 1 and 3, there is an important second layer relationship between stability and efficiency, which is an indirect relationship linked by measurement uncertainty. When faced with uncertainty, some system developers may design an "error budget", the size of which depends on the gap between testing requirements and system uncertainty. The two main factors that affect uncertainty are accuracy (instrument performance) and measurement consistency (stability). If the instruments in the system have high accuracy, there is a large margin of error that can tolerate lower stability. If the instrument can provide consistent results, there will also be a large margin of error that can tolerate lower accuracy.
Multiple requirements are all 'high'
To meet the multiple requirements of "high speed and high stability" or "high efficiency and high speed", complex and precise instruments may need to be used, and their prices will naturally be slightly higher compared to equipment with poor capabilities. However, many high-performance instruments may have built-in hardware accelerators that can speed up some time-consuming tasks such as averaging and calibration. Some models may also include multiple algorithms that can calculate parameters such as adjacent channel power (ACP). If all three requirements are "high", it is necessary to carefully inspect every part of the system - testing equipment, switching subsystems, cables, connectors, etc. The solution is likely to be expensive, but it can provide some additional features and advantages.
Tip 2: Examine the essence and characteristics of DUT
A typical automated testing system can perform three basic tasks: providing signal sources, conducting measurements, and switching. As for which signal generator, power meter, spectrum analyzer, network analyzer, switch matrix, and cable to use, it depends on the electrical and mechanical properties of the DUT. At RF and microwave frequencies, there are some basic characteristics that require special attention.
Electrical parameters
The fundamental property is the main consideration: is it passive and linear, or active and nonlinear? Passive linear components are easier to handle because their gain and phase offset are generally fixed at all allowed input power levels throughout the entire operating bandwidth range. On the contrary, active components require extra caution as they typically have non-linear operating regions that are highly sensitive to input power and may produce different results at different levels. In this way, it may be necessary to add amplifiers or ground control power levels in the testing system, and perhaps also add couplers to separate the power levels input to the DUT and confirm whether they are correct. These additional additions must not be ignored: at high frequencies, each system component has complex impedance values (accompanied by S-parameters), and each additional connection may have unnecessary interactions with the DUT.
Avoid mismatch: impedance mismatch of any connecting wire
Possible injection loss may occur, resulting in the loss of some power of the signal source or measurement signal. As is well known, power is very expensive at high frequencies, and if the required power must be provided over a wide frequency range, it will become even more expensive. Tip: Use high usage cables and accessories, and use a Vector Network Analyzer (VNA) to fully measure the actual impedance of the cables and accessories, especially if the DUT is an active component.
Reduce VSWR to
The combination of switching matrix, its connectors, internal and external cables, and even the bending radius of any RF cable may result in errors due to the voltage standing wave of DUT. Tip: To reduce this error, you can use a switching matrix with a voltage standing wave ratio (VSWR) specification of 1:2:1 or better.
Increase isolation
If your test requires measuring both high-level and low-level signals simultaneously, the isolation specification of the switching matrix will affect the accuracy of the measurement. Tip: If there are many paths through the DUT, a signal generator and spectrum analyzer can be used to measure the isolation characteristics as much as possible. If this cannot be achieved, the system should route high and low level signals along non adjacent paths or through different switches during configuration and setup.
Institutional attributes
Another set of details to consider is the number and type of signal and power (AC or DC) connections, which can affect factors such as the required switching matrix size and the complexity of system wiring. Tip: By using a switching matrix with sufficient ports, all connections from the system to the DUT can be established. This reduces the delay time required for signal stabilization and lowers the probability of damaging the switching matrix or DUT due to sudden changes in power levels.
Tip 3: Understand, measure, and correct the characteristics of RF signal paths
If there is no additional correction, the specifications of the product can only be extended to the "calibration plane" located on the input and output connectors of the instrument. To obtain accurate and consistent measurement results, as well as corrected DUT results, we recommend extrapolating the calibration surface as close as possible to the DUT. There are several ways to achieve this, whether the path is passive or active, and whether the DUT is located locally or remotely.
The processing method of passive path
Passive components have fixed gain and phase offset at all allowed input power levels throughout the entire bandwidth range. However, there may be impedance mismatch on each wire connected along the passive path, resulting in injection loss and phase shift (or delay). At high frequencies, even simple passive elements can become complex transmission line elements, and it is not possible to directly add the losses and phase offsets on the path using simple algebraic methods. Tip: Use VNA to measure the entire connected path or analyze the S-parameter characteristics of each element, and use vector learning to simulate the total loss and phase offset of the entire path. These values can be stored in the system's PC and applied as needed to correct measurement results or for use by network analyzers, such as adjusting filters and other changes in DUT in real-time.
Correct the proactive path
The efficiency of active components varies with changes in input power, and to improve measurement accuracy, the approach depends on whether the component operates within its linear or nonlinear response region. If an active component (such as an amplifier) operates in a linear region far below its 1 dB compression point during calibration and measurement operations, accurate correction can be made at any power level within that region. Tip: If the active component operates within its nonlinear response region, the power level used for measurement must also be used for calibration to ensure accurate correction. If measurements need to be taken at multiple power levels in nonlinear mode, they must also be calibrated separately at each level and stored for future use. Tip: Check the frequency response of the active components within the frequency range of the DUT. Similarly, you should measure the entire path at a specific power level, or analyze the S-parameter characteristics of each interface, and use vector learning to generate a model that can be applied later or immediately. Tip: In order to simplify the measurement and correction of RF signal path characteristics, some system developers will minimize the use of active components as much as possible. This can reduce calibration effort and the chance of errors caused by changes in power level during nonlinear mode operation.