IMU inertial navigation module six axis gyroscope sensor for autonomous and unmanned driving: M-G370. Since 2020, automatic driving and driverless driving have ushered in a new breakthrough. As a member of the road traffic system, autonomous vehicle should first judge whether there are obstacles around them and whether their own driving will cause danger to other traffic participants. This requires what is called positioning navigation. The key to positioning and navigation lies in the IMU inertial navigation module in the car. So why is the inertial navigation module the safety line for autonomous and unmanned driving? What kind of inertial navigation module is cost-effective for autonomous and unmanned driving?
The inertial navigation module (referred to as the inertial navigation module) in autonomous driving is an autonomous navigation system that does not rely on external information and is not easily disturbed. The inertial navigation module measures the acceleration of the carrier in the inertial reference frame, performs integration operations, and obtains the instantaneous velocity and position data of the carrier. It then transforms it into the navigation coordinate system to obtain information such as velocity, yaw angle, and position in the navigation coordinate system from the surface. The advantage of the inertial navigation module (referred to as the inertial navigation module) in autonomous driving is that, given initial conditions, autonomous driving and unmanned vehicles can determine their current position, direction, and speed without the need for external references. Suitable for precise positioning and orientation in various complex geographical environments and external disturbances, and able to continuously measure position changes while maintaining dynamic attitude benchmarks. So why is the inertial navigation module the safety line for autonomous and unmanned driving? There are three main reasons: 1. The inertial navigation module has no external dependence on the relative positions of autonomous and unmanned driving, and is a system similar to a black box; By contrast, GPS based positioning relies on satellite signal coverage, while high-precision map based positioning relies on the quality of perception and algorithm performance, which is related to weather and has a certain degree of uncertainty. 2. Also because the inertial navigation module does not need external signals, it can be installed in the unexposed area such as the chassis of autonomous vehicle to resist external electronic or mechanical attacks; Compared to other methods, vision, laser, and millimeter waves need to receive electromagnetic or light signals from outside the car when providing autonomous driving positioning. This makes it easy to be blinded by electromagnetic or strong light signals from attackers, and can also be damaged by unexpected situations such as stones and scratches. 3. The measurement values of angular velocity and acceleration in the inertial navigation module already have a certain degree of redundancy, combined with redundant information such as wheel speed sensors and steering wheel angles, making the confidence of its output results higher than the positioning results provided by other sensors.
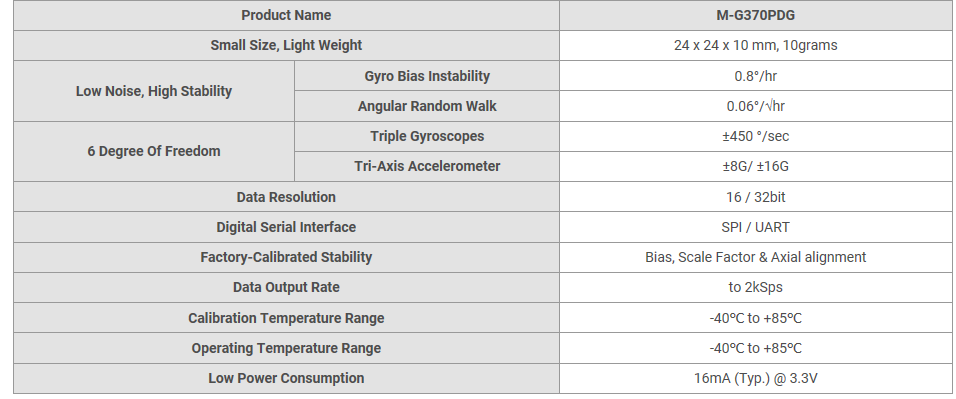
For the IMU inertial navigation module M-G370 with FOG level performance, the newly developed accelerometer also greatly improves zero bias stability (up to 6uG), with an initial zero bias error of 2mg (1o). Equipped with newly developed gyroscope sensors, the zero bias stability (0.8 °/hour) has been greatly improved. With high precision and stable testing performance, it is widely used in inertial navigation and fields that require high position measurement accuracy, such as autonomous driving and unmanned driving. A high-speed DSP with new attitude angle output function and support for various applications, as well as an extended Kalman filter, can provide high-precision real-time attitude angle output (roll angle/pitch angle/yaw angle) at lower power consumption. It can be widely used in vehicles, ships, and various other industrial products and systems for measuring data and controlling motion. Moreover, the system no longer requires high-speed calculation of dynamic attitude angles, thereby reducing system load and power consumption. In applications such as autonomous driving and unmanned driving, high-performance IMU inertial navigation modules are crucial. The performance of other types of sensors is not sufficient to continuously reduce the impact of external environment on accuracy. The IMU inertial navigation module M-G370 with FOG level performance still has great potential.










 AD_MSG
AD_MSG

