







PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD


 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


Why do we need an Inertial Measurement Unit (IMU)
Firstly, inertial navigation systems generally have inertial measurement units (IMUs) that can be used to accurately measure the attitude data of the LiDAR itself, thereby calculating the scanning direction of the LiDAR.
Secondly, during the measurement process, it is usually achieved by satellite systems (BDS/GPS/GLONASS/GALILEO)+inertial navigation systems to measure the spatial coordinates of the LiDAR itself. However, satellite systems do not have signals in certain areas (such as tunnels), and the position signals of satellite systems are relatively slow signals. Calculating position information requires faster coordinate information updates, so inertial measurement units (IMUs) are needed to provide more position information every second.

The Impact of Inertial Measurement Units (IMUs) on Accuracy
The indicators of LiDAR surveying equipment include system parameter indicators, LiDAR unit indicators, inertial navigation system indicators, and other units. The accuracy of the Inertial Measurement Unit (IMU) determines the attitude and position accuracy, thus directly affecting the system accuracy. Using Epson's M-G370, after post-processing, the accuracy of the inertial navigation system of the laser surveying radar can reach:
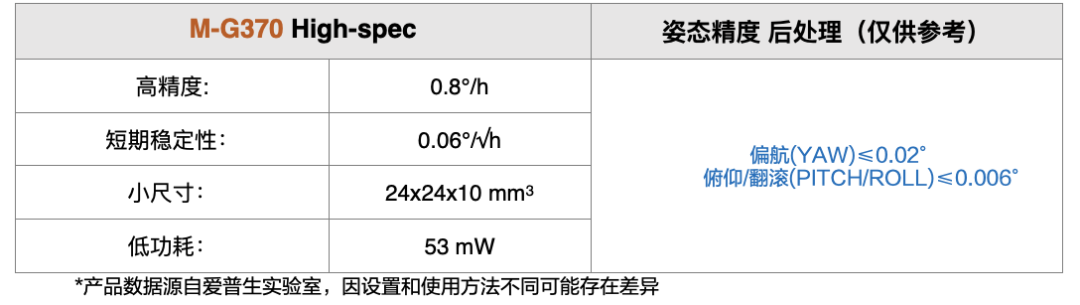
In addition to high precision, Epson's Inertial Measurement Unit (IMU) also features small size, light weight, and low power consumption, which helps meet the requirements of miniaturization and lightness for customer applications; And the product design is compatible with hardware and software, with more stable performance and easy maintenance and upgrading for customers.