







PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD


 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


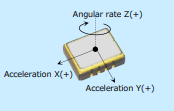
The x-axis of a gyroscope is usually aligned with the major axis (usually the horizontal axis) of the device, and it measures the angular velocity of an object rotating around the x-axis, commonly known as the pitch angle. The pitch angle refers to the angle of rotation of an object relative to the ground plane, with positive values indicating upward rotation and negative values indicating downward rotation.
The y-axis of a gyroscope is usually aligned with the wide axis (usually the vertical axis) of the device, and it measures the angular velocity of an object rotating around the y-axis, commonly known as the yaw angle. Yaw angle refers to the left and right rotation angle of an object relative to the horizontal plane, with positive values indicating right rotation and negative values indicating left rotation.
The ratio of gyroscope x to y is determined based on specific equipment and application needs. In some applications, the ratio of x and y may be 1:1, meaning their measurement range and sensitivity are the same. In other applications, the ratio may vary to meet the measurement needs of rotation in different directions. The determination of proportion usually requires calibration and debugging to ensure accurate and reliable measurement results of the gyroscope on different axes.
For some applications that require high-precision measurement of rotation and rotation, gyroscopes are usually combined with other sensors (such as accelerometers). By integrating the measurement results of gyroscopes and accelerometers, more accurate and reliable state information can be obtained. For example, by combining the data of gyroscopes and accelerometers, real-time tracking and measurement of the attitude, direction, and position of objects can be achieved.
In summary, the x-axis and y-axis of a gyroscope measure the angular velocity of an object rotating around the x-axis and v-axis, respectively. The x-axis is usually aligned with the long axis of the device, and the pitch angle is measured. The y-axis is usually aligned with the wide axis of the device, and the yaw angle is measured. The ratio of x to y is determined based on specific application and equipment requirements. The final measurement result needs to be processed by integrating data from other sensors to obtain more accurate and reliable attitude information,