PROBLEM?
+86 13430584894
luojunjie@piezoman.com
PAYMENT_METHOD


 AD_MSG
AD_MSG
POP_UP_MESSAGE_CONTENT


-M-G370PDS0 improves short-term noise, expands model lineup, and expands product selection range-

Seiko Epson (TSE: 6724) has developed the M-G370PDS0 sample, which is a new type of inertial measurement unit (IMU) 1 equipped with high-performance six axis sensors. The new product is scheduled for mass production in the spring of 2022.
Epson's IMU was first launched in 2011 and has been used in a range of customer applications, earning a good reputation for excellent performance and quality. In recent years, the application of IMU has expanded to fields such as measurement of unmanned systems, aerial and underwater video photography, resulting in an increasing demand for more accurate position and attitude control. Therefore, the demand for more accurate IMUs is increasing, which is crucial for attitude control, especially in terms of noise performance. The angle random walk 2 (short-term output change) of M-G370PDS0 is 0.03 °/√ h, which is half of its predecessor and can more accurately detect very small changes in device and system attitude because they are not lost in sensor noise. This IMU has a small size, light weight, and low power consumption, which can help customers make their products smaller and lighter. The new IMU maintains compatibility with earlier products (M-G370/365/364/354), making performance upgrades easy.
Product features
Equipped with low noise and high-performance sensors, maintaining high stability with a random walk angle of 0.03 °/√ h before Epson. Noise density: 2.5 (°/h)/√ Hz
Excellent dynamic performance (non-linear scaling factor), high-precision measurement, from static to high-speed motion
Maintain compatibility with early IMUs (M-G370/365/364/354), significantly reducing customer development costs and evaluation time
Low current consumption: 16ma
Product application
Unmanned vehicles (industrial drones, ground vehicles, maritime detectors, etc.)
Vibration reduction of cameras, antennas, etc.
Vibration, angle, trajectory measurement, etc. of industrial equipment.
Navigation systems (GNSS3, INS4, high-precision locator), etc.
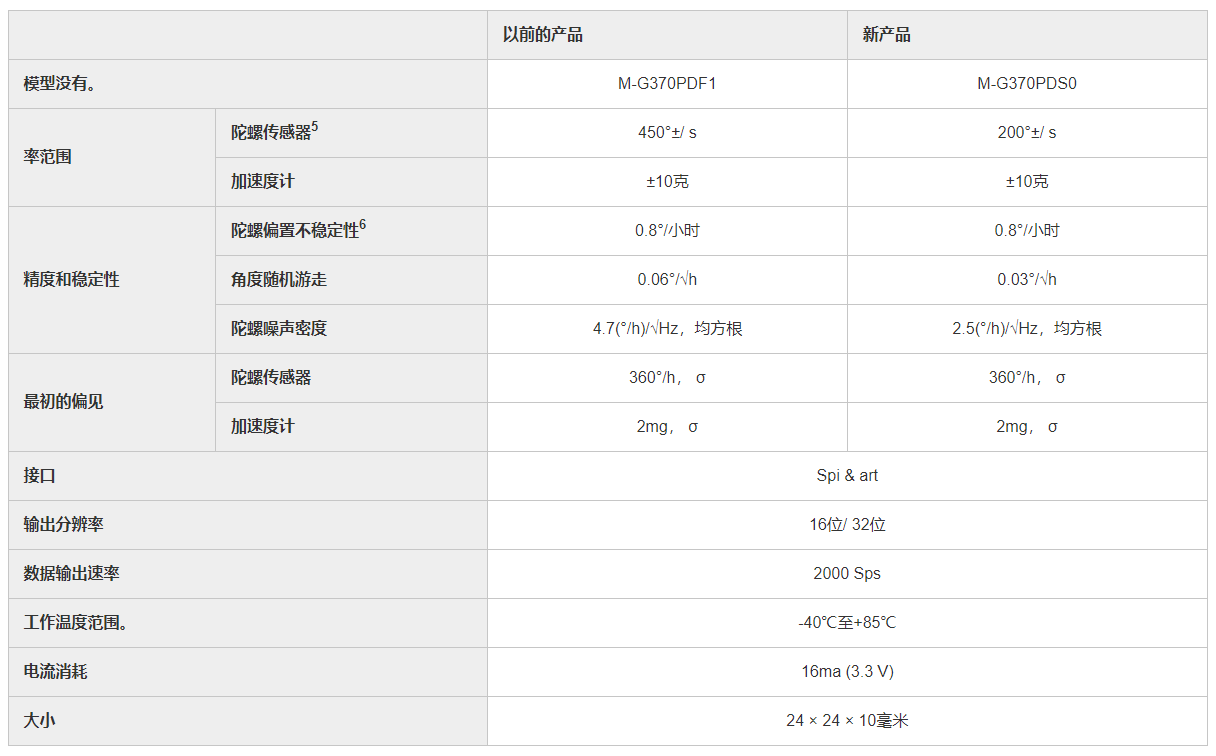
Product specifications
Glossary
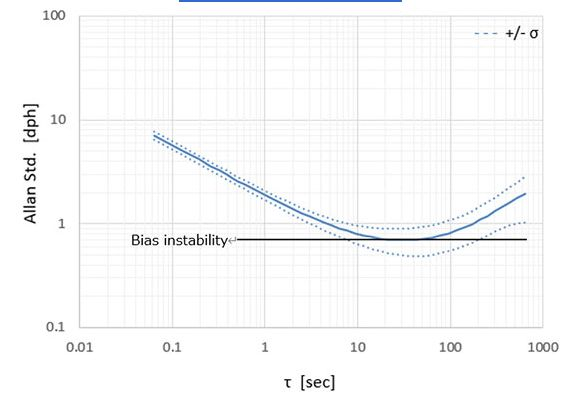
Allan variance is an indicator of sensor performance, and it represents the stability of static output. The horizontal axis represents the average time of the data, and the vertical axis represents the distribution of the average value separated by the average time. Given that the characteristic slopes appearing in Allan variance are -1, -1/2, 0, 1/2, and 1st power slopes, Allan variance is correlated with noise density, which is frequency. Allan variance is an indicator expressed in time. The smaller the value, the higher the stability and performance.
The Inertial Measurement Unit (IMU) is a device used to detect inertial motion. It consists of a three-axis angular rate sensor and a three-axis acceleration sensor. The Allan variance part with a slope of -1/2 is called angle random walk. Due to the correlation with white noise, increasing the average time will result in a decrease in the value at -1/2 of the average time. 3 Global Navigation Satellite Systems (GNSS) are satellite systems used to determine the geographical location of any place in the world. 4 Inertial Navigation Systems (INS). 5 Gyroscope sensors (angular rate sensors) measure the rotation angle (angular rate) of an object relative to the reference axis per unit of time. The part of Allan variance that represents the horizontal (zero power) characteristic is called bias instability. It is related to 1/f noise and is one of the important indicators of sensor potential.
M-G370S gyroscope Allen variance (model)